
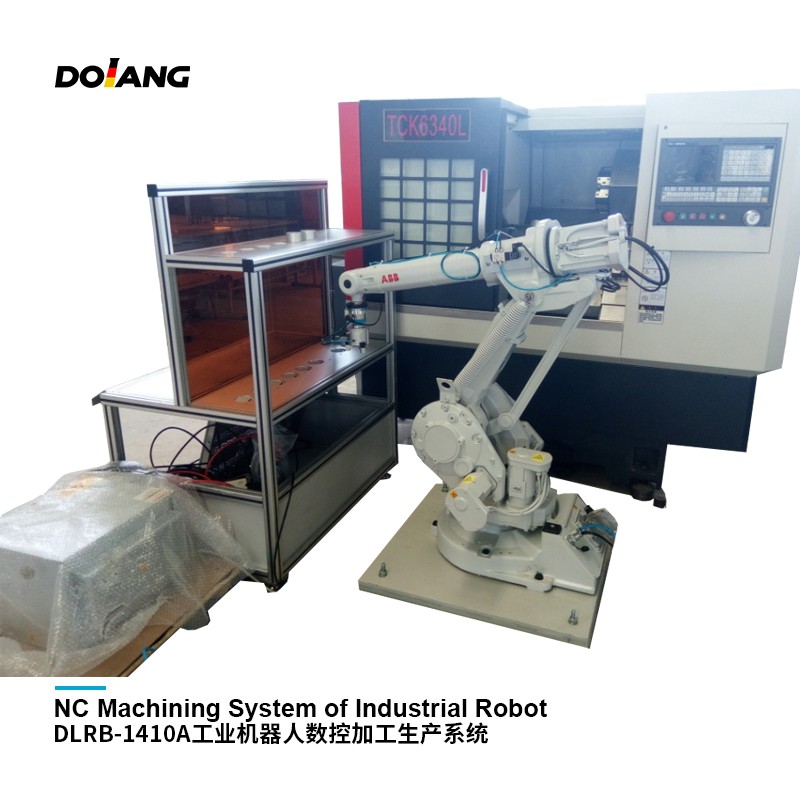
Sistema de mecanizado CNC DLRB-1410A de equipos de entrenamiento de robots industriales

- Dolang
- porcelana
- 30-60 días
La programación fuera de línea es la mejor manera de expandir los retornos de inversión del sistema de robot. Puede completar la programación del robot en la oficina mediante la simulación de ABB y el software de programación fuera de línea RobotStudio sin necesidad de interrumpir la producción. El procedimiento del robot puede estar listo de antemano para mejorar la eficiencia de producción general.
DLRB-1410A
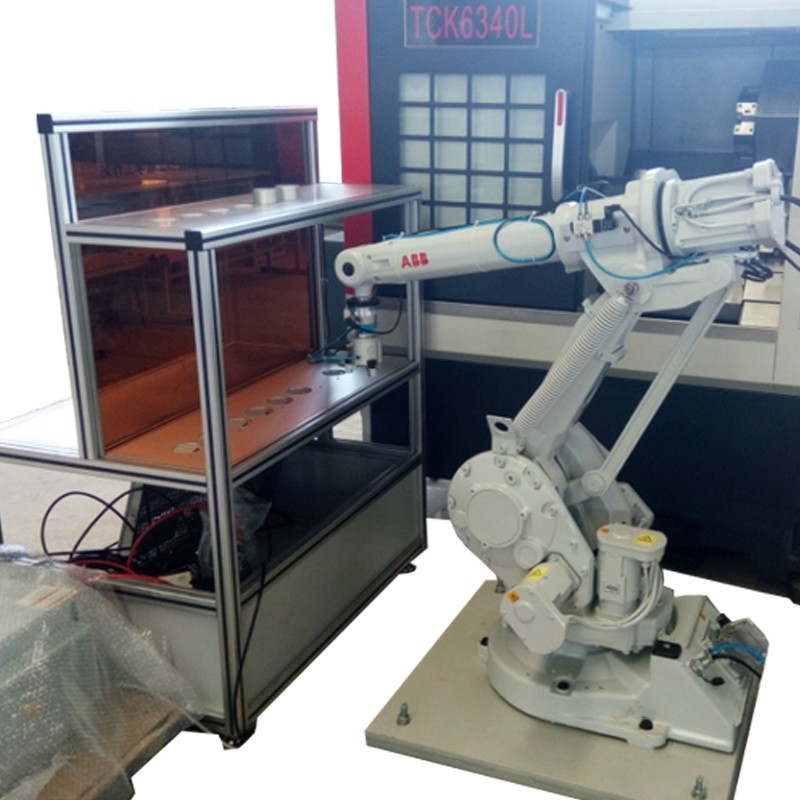
Sistema de mecanizado CNC DLRB-1410A de equipos de entrenamiento de robots industriales
Equipo Visión general
a) DLRB-1410A Sistema de mecanizado CNC de equipos de entrenamiento de robots industriales, parece convertir el robot real en su computadora PC mediante la programación fuera de línea de tecnología de robot virtual.
B) La programación fuera de línea es la mejor manera de expandir los retornos de inversión del sistema de robot. Puede completar la programación del robot en la oficina mediante la simulación de ABB y el software de programación fuera de línea RobotStudio sin necesidad de interrumpir la producción. El procedimiento del robot puede estar listo de antemano para mejorar la eficiencia de producción general.
C) Puede realizar tareas de formación, programación y optimización mediante diversas herramientas proporcionadas por RobotStudio bajo la premisa de no afectar la producción. Puede mejorar la rentabilidad del sistema de robot para permitirle obtener una variedad de beneficios.
Técnico Parámetros
1. Potencia de entrada: trifásico de cuatro hilos 380V ± 10% 50HZ / 60Hz
2. Entorno de trabajo: temperatura -10 ° C - + 40 ° C, humedad relativa <85% (25 ° C), sin perlas de agua altitud de condensación <4000 m
3. Control de potencia: apagado automático de aire, con protección contra sobretensión, protección contra subtensión, protección contra sobrecorriente, sistema de protección contra fugas.
4. Potencia de salida:
(1) Trifásico de cuatro hilos 380V ± 10% 50HZ. Controlado por el interruptor de arranque y protegido por un fusible
(2) Fuente de alimentación DC: 24V / 1A.
5. Torno CNC: máquina de torno CNC de bancada inclinada de función completa
6. Robot: ABB IRB1410
Capacitación Contenido
Formación y aprendizaje de robots industriales
1. Principios básicos y constitución de robots industriales
2. Cognición de la ontología de robots industriales
3. Cognición de partes eléctricas de robots industriales
4. Cognición de software de robot industrial
5. Reconocimiento de servomotor y controlador
6. Cognición del robot reductor
7. Cognición del controlador de robot industrial
8. Análisis cinemático y control de robots industriales
9. Aprendizaje y entrenamiento de control de movimiento de articulaciones robóticas de seis grados de libertad
10. Aprendizaje y entrenamiento de control de trayectoria de movimiento lineal de robot de seis grados de libertad
11. Aprendizaje y entrenamiento de control de seguimiento de movimiento circular de robot de seis grados de libertad
12. Aprendizaje y entrenamiento de control de restricciones de aceleración y desaceleración del robot de seis grados de libertad
13. Entrenamiento de operación básica de control de robot
14. Sistema de coordenadas del robot (coordenadas de la herramienta, coordenadas del usuario) entrenamiento de operación de la aplicación
15. Capacitación en operación de robots y enseñanza de programación
dieciséis. Aplicación típica de robots: ejemplos de aplicación para carga y descarga de máquinas
17. Aplicación típica de robots: ejemplos de aplicaciones de ensamblaje de piezas
18. Aplicación típica de robots: ejemplos de aplicaciones visuales
19. Capacitación en aceptación de robots y medición de precisión
20. Capacitación en mantenimiento de robots
veintiuno. Agarre de la mano del robot, diseño de herramientas de plataforma de entrenamiento
Formación y aprendizaje en torno CNC
1. Principio de la máquina herramienta y aprendizaje de la estructura
2. Clasificación y función de la máquina herramienta CNC
3. Aprendizaje del sistema CNC
4. Tecnología de aplicación de máquina herramienta CNC
5. Operación y programación de máquinas CNC
6. Diseño estructural de máquinas herramienta CNC
7. Diseño de sistemas eléctricos de máquinas herramienta CNC
8. Diseño de accesorios de mesa de máquina herramienta
Aprendizaje y capacitación en estaciones de trabajo de robots industriales virtuales
1. Principio de cognición del sistema virtual de entrenamiento de robots industriales
2. Aprendizaje de software del sistema de entrenamiento de robots industriales virtuales
3. Operación de entrenamiento del sistema de entrenamiento de robots industriales virtuales
4. Aprendizaje y entrenamiento de control de movimiento de articulaciones robóticas de seis grados de libertad
5. Aprendizaje y entrenamiento de control de trayectoria de movimiento lineal de robot de seis grados de libertad
6. Aprendizaje y entrenamiento de control de seguimiento de movimiento circular de robot de seis grados de libertad
7. Aprendizaje y entrenamiento de control de restricciones de aceleración y desaceleración del robot de seis grados de libertad
8. Entrenamiento de operación básica de control de robot
9. Sistema de coordenadas del robot (coordenadas de la herramienta, coordenadas del usuario) entrenamiento de operación de la aplicación
10. Capacitación en operación de robots y enseñanza de programación
11. Aplicación típica de robots: ejemplo de escenarios de aplicación de carga y descarga de máquinas
12. Aplicación típica de robots: ejemplos de manejo de escenarios de aplicación
Entrenamiento en técnica eléctrica
1. Instalación y puesta en servicio de circuitos eléctricos.
2. Características y aplicaciones del servomotor
Entrenamiento de prueba de fallas
1. Encuentra entrenamiento de falla de programa modificado
2. Entrenamiento de resolución de problemas de fallas de parámetros
3. Capacitación en resolución de problemas de fallas de cableado eléctrico
4. Capacitación en resolución de problemas de fallas mecánicas
Tecnología hidráulica y neumática
1. Aprendizaje de los principios de control hidráulico y neumático.
2. Cálculo y diseño de control hidráulico y neumático.
3. Instalación y puesta en servicio de circuitos de control hidráulicos y neumáticos.
4. Principio de funcionamiento y aplicación de la válvula neumática controlada electrónicamente.
5. Principio de funcionamiento y aplicación del generador de vacío.
6. Principio de funcionamiento y aplicación de los componentes de la fuente de gas.
7. Tipos, principio de funcionamiento y aplicación de cilindros y pinzas.
FAQ
Q1. ¿Qué otros servicios puede proporcionar Dolang además de los equipos didácticos?
Respuesta: Plan de estudios estándar, material didáctico para profesores (PPT), lista de formación del equipo de enseñanza, banco de preguntas de examen, lista de tareas del aula, libros de los estudiantes (materiales de aprendizaje), software de enseñanza, etc.
Q2. ¿Qué tipo de certificación?
Certificación de tres sistemas ISO9000, ISO14001, OHSMS28001; La certificación CE, la certificación SGS y Dolang son miembros de la medalla de oro de worlddidac.
Q3. ¿Qué puede hacer Dolang por nuestros profesores?
Respuesta: a) El grupo Dolang tiene la escuela vocacional Shandong Dolang, que es especialmente responsable de la formación de profesores. Nuestros cursos de formación de profesores nacionales y los cursos de formación de profesores provinciales cooperan con la escuela de Dolang;
B) Dolang tiene una gran cantidad de recursos universitarios vocacionales chinos, que también se pueden utilizar para la formación de profesores en su país.
Q4. ¿Qué tipo de métodos de formación proporcionará Dolang?
1. Le proporcionamos libros manuales detallados, videos y servicio de capacitación en línea.
2. Le proporcionamos capacitación en el sitio, podemos enviar un ingeniero a su lugar para recibir capacitación.
3. Puede enviar a su gente a Dolang para recibir capacitación.










